- پروگرامرها
- دما و رطوبت
- سایر ماژول ها
- سنسور بخار سرد
- کی پد و جوی استیک
- ماژول GPS-GPRS
- ماژول رله و سوییچ
- ماژول شبکه
- ماژول نمایشگر
- ماژول های RF
- ماژول های RFID
- ماژول های پخش صدا
- ماژول های پردازش تصویر
- ماژول های تاریخ و ساعت
- ماژول های تغذیه – ولتاژ – جریان
- ماژول های ذخیره داده
- ماژول های شتاب سنج و ژیروسکوپ
- ماژول های مبدل
- ماژول های محافظ شارژ باتری
- ماژول های مولد پالس
- ماژول ولتمتر و آمپرمتر


")
")
")
")
")





سروو موتور دنده فلزی MG995
11
نفر در حال مشاهده این محصول هستند!
توضیحات
MG995 Servo Motor Metal Gear
MG995 is a digital metal gear high torque servo for airplane, helicopter, RC-cars from 10 to 6-th scale truggy and monster and many RC model.
It is ideal for low torque and light weight projects.
They work with most electronic control cards with microcontrollers, such as Arduino, Nodemcu, Esp32, Pic’s and Raspberry Pi cards and others.
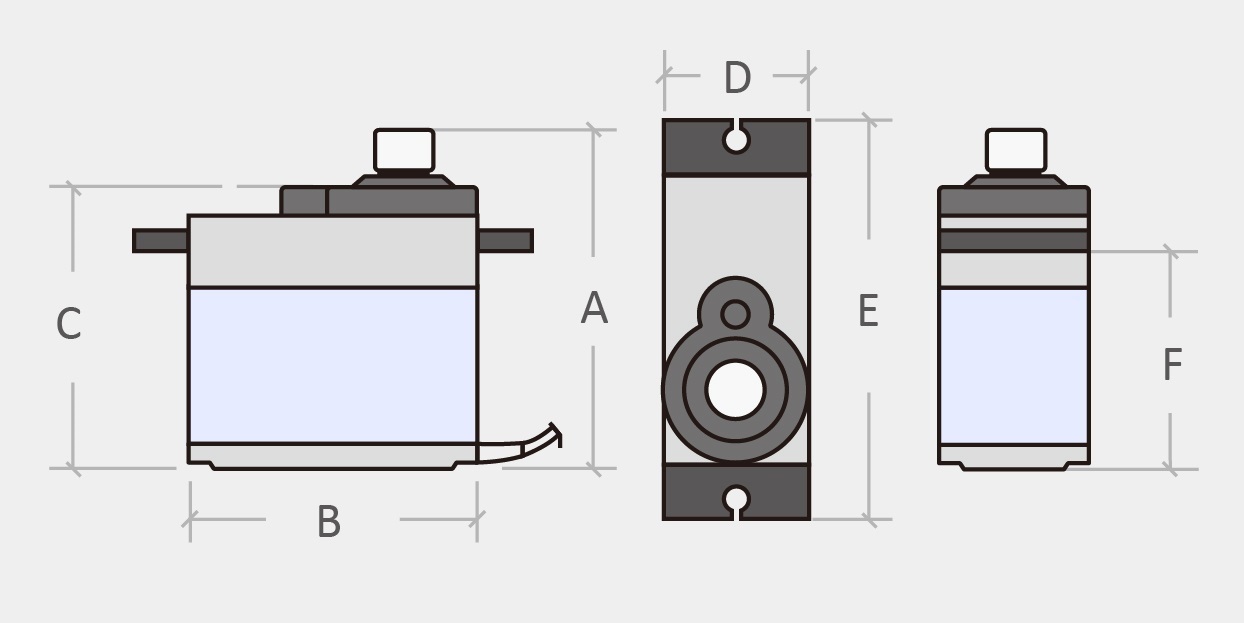
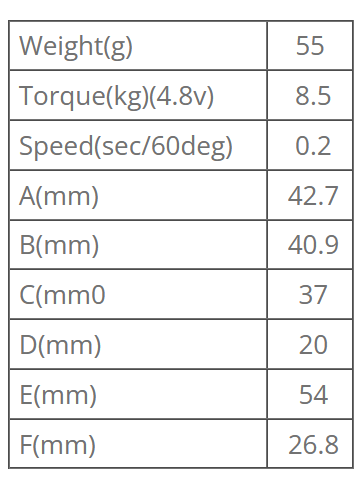
Specification
Weight: 55g
Dimension: 40.7×19.7×42.9mm
Stall torque: 9.4kg/cm (4.8v); 11kg/cm (6v)
Operating speed: 0.20sec/60degree (4.8v); 0.16sec/60degree (6.0v)
Operating voltage: 4.8~ 6.6v
Gear Type: Metal gear
Temperature range: 0- 55deg
Dead band width: 1us
servo wire length: 29cm
Current draw at idle 10MA
No load operating current draw 170MA
Stall current draw 1200MA
NOTE
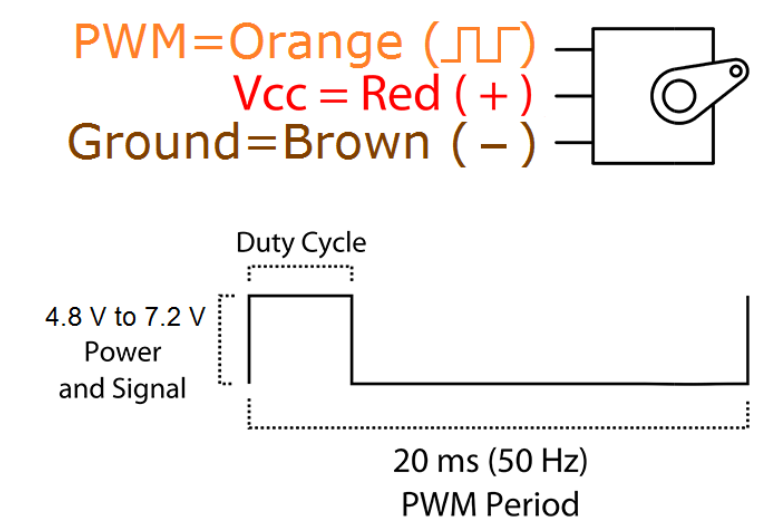
1. Power the microcontroller and the servos separately, since the current of the servos is more than that supplied by a microcontroller.
2. The servomotor incorporates a controller that only allows rotation from 0° to 180° if the PWM pulse width is commanded from the microcontroller.
3. If you are using the servo tester it will be limited from 0° to 90°.
This servo does not incorporate a stop to mechanically define the rotation of the gears from 0° to 180°, so if it is rotated manually the servo will have continuous rotation without having a stop.
Example
Controlling servos on Arduino is very simple, since the Standard IDE provides the “servo.h” library, which allows you to simultaneously control up to 12 servos on Arduino Uno/Nano and up to 48 servos on Arduino Mega.
Among the typical examples to illustrate the operation of servos we have the Sketch “Sweep”, which performs a continuous sweep with the servo.
To do this, it increases the angle from 0 to 180º at a rate of 1º every 15ms, then performs the opposite operation from 180º to 0º, to finally restart the loop.
#include <Servo.h>
Servo myservo; // crea el objeto servo
int pos = 0; // posicion del servo
void setup() {
myservo.attach(9); // vincula el servo al pin digital 9
}
void loop() {
//varia la posicion de 0 a 180, con esperas de 15ms
for (pos = 0; pos <= 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
//varia la posicion de 180 a 0, con esperas de 15ms
for (pos = 180; pos >= 0; pos -= 1)
{
myservo.write(pos);
delay(15);
}
}
نظرات (0)









دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.