

TJA1050 CAN CONTROLLER INTERFACE MODULE BUS DRIVER INTERFACE MODULE
TJA1050 CAN Controller Bus Driver Interface Module is the interface between the Controller Area Network (CAN) protocol controller and the physical bus.
The device provides differential transmit capability to the bus and differential receive capability to the CAN controller. The TJA1050 is the third Philips high-speed CAN transceiver after the PCA82C250 and the PCA82C251.
The most important differences are
• Much lower electromagnetic emission due to optimal matching of the output signals CANH and CANL
• Improved behavior in case of an unpowered node
• No standby mode.
This makes the TJA1050 eminently suitable for use in nodes that are in a power-down situation in partially powered networks.
Specifications and Features
1. Fully compatible with the ISO 11898 standard
2. onboard TJA1050 CAN controller interface chip
3. chip commonly used pin has led, convenient connection to use
4. pin 5 v to power supply
5. PCB board size: 22 (mm) x11.5 (mm)
6. High speed (up to 1 Mbaud)
7. Very low Electro-Magnetic Emission (EME)
8. Differential receiver with wide common-mode range for high Electro-Magnetic Immunity (EMI)
9. An unpowered node does not disturb the bus lines
10. Transmit Data (TXD) dominant time-out function
11. A silent mode in which the transmitter is disabled
12. Bus pins protected against transients in an automotive environment
13. Input levels compatible with 3.3 V and 5 V devices
14. Thermally protected
15. Short-circuit proof to the battery and to ground
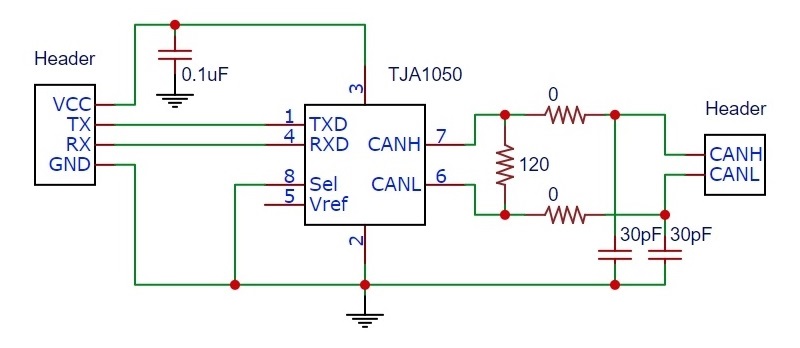
Module Connections
1 x 4 Header
VCC = 5V power
TX= Transmit data input. Reads in data from CAN controller and sends to bus lines
RX= Receive data output. Reads out data from bus lines to the CAN controller
GND= Ground, connects to MCU ground.
1 x 2 Header
CANH = CAN Bus H connection. CANH connects to CANH on other modules
CANL = CAN Bus L connection. CANL connects to CANL on other modules
The module has 2 small M2 holes for mounting.










نقد و بررسیها
هنوز بررسیای ثبت نشده است.