


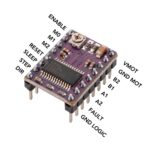
درایور استپر موتور DRV8825
۷۸,۰۰۰ تومان
موجود در انبار
15
نفر در حال مشاهده این محصول هستند!
توضیحات
Description
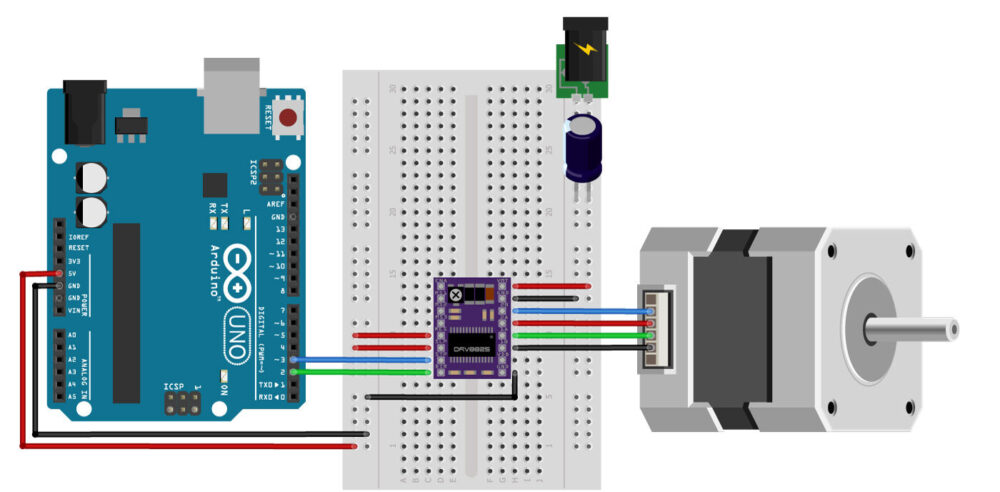
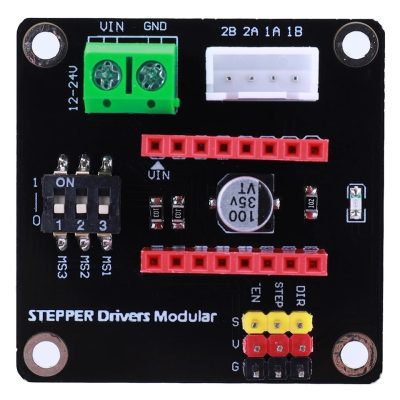
The DRV8825 Module A stroke engine driver includes an auxiliary board TI DRV8825 for launching microstrip dipole stator motors.
The module has an output and interface pin which is roughly equal to the A4988’s Aperture Stream Driver, which can be the highest-level replacement function for this win-win in many projects.
The features of this module include setting the flow range, protecting against excess flow and excessive temperature rise, and also has 6 microspaces with a resolution of up to 1/32 steps.
This module works at a voltage of 8.2 to 45 volts and can flow up to 2.5A in any phase without any fan-socket and fan current (with effective cooling up to 2.2A). This module is fully compatible with Ardino’s boards.
Features
have a simple control interface for direction and step
It has 6 different step modes: Full step, half step, ¼ steppe, 1/8 step, 1/8 step, 1/16 step and 1/32 step
Adjustable flow control for maximizing output current using
maximum potentiometer. Voltage 45 V
with internal regulator
Direct connection voltage 3.3 V and 5 V. System
The DRV8825 Module A stroke engine driver includes an auxiliary board TI DRV8825 for launching microstrip dipole stator motors.
The module has an output and interface pin which is roughly equal to the A4988’s Aperture Stream Driver, which can be the highest-level replacement function for this win-win in many projects.
The features of this module include setting the flow range, protecting against excess flow and excessive temperature rise, and also has 6 microspaces with a resolution of up to 1/32 steps.
This module works at a voltage of 8.2 to 45 volts and can flow up to 2.5A in any phase without any fan-socket and fan current (with effective cooling up to 2.2A). This module is fully compatible with Ardino’s boards.
Features
have a simple control interface for direction and step
It has 6 different step modes: Full step, half step, ¼ steppe, 1/8 step, 1/8 step, 1/16 step and 1/32 step
Adjustable flow control for maximizing output current using
maximum potentiometer. Voltage 45 V
with internal regulator
Direct connection voltage 3.3 V and 5 V. System
example
Although understanding the ins and outs of the A4988 and the DRV8825 may have been difficult, the advantages of using them are clear.
The code necessary for its control is extremely simple, which makes them very practical and useful components to use.
We simply have to indicate, using two digital outputs, the instant at which we want the motor to advance one step, and the direction of rotation.
The speed of rotation is controlled by the time we allow to pass between steps.
The following example rotates the stepper motor one revolution in one direction, and two in the opposite direction at a slightly higher speed.
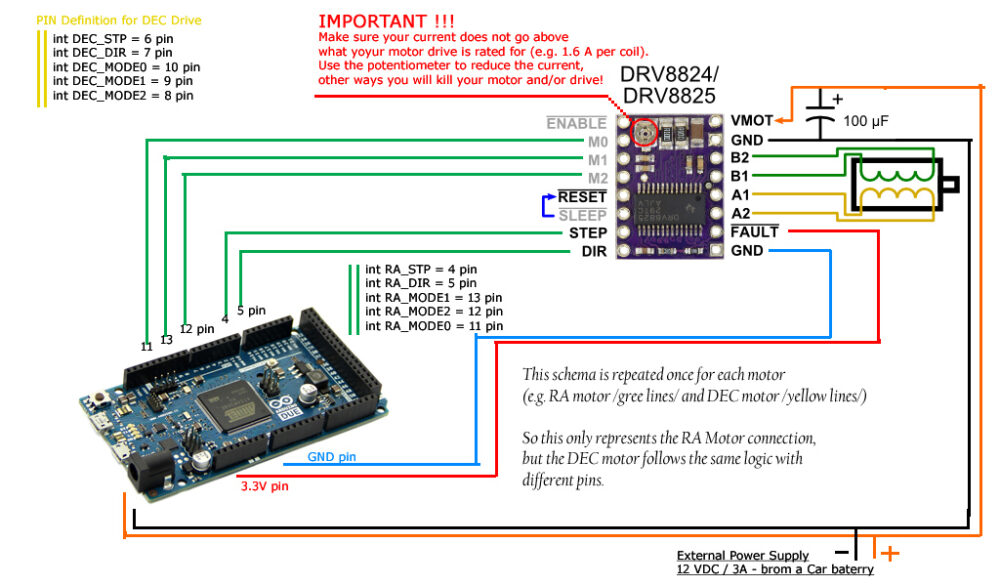
const int dirPin = 8;
const int stepPin = 9;
const int steps = 200;
int stepDelay;
void setup() {
// Marcar los pines como salida
pinMode(dirPin, OUTPUT);
pinMode(stepPin, OUTPUT);
}
void loop() {
//Activar una direccion y fijar la velocidad con stepDelay
digitalWrite(dirPin, HIGH);
stepDelay = 250;
// Giramos 200 pulsos para hacer una vuelta completa
for (int x = 0; x < steps * 1; x++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(stepPin, LOW);
delayMicroseconds(stepDelay);
}
delay(1000);
//Cambiamos la direccion y aumentamos la velocidad
digitalWrite(dirPin, LOW);
stepDelay = 150;
// Giramos 400 pulsos para hacer dos vueltas completas
for (int x = 0; x < steps * 2; x++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(stepPin, LOW);
delayMicroseconds(stepDelay);
}
delay(1000);
}
نظرات (0)






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.